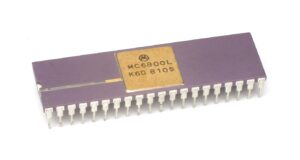
Motorola-6800-Mikroprozessor aus einer CPU-Sammlung. Foto: Konstantin Lanzet, CC BY-SA 3.0.
Als Motorola Mitte der 1970er-Jahre begann, seine Mikroprozessorstrategie zu formulieren, befand sich die Halbleiterindustrie in einer Phase rascher Experimente. Rechnerleistung wanderte gerade aus Großrechnern und Minicomputern in immer kleinere Bauformen, doch eine klare Architektur für Mikrocomputer existierte noch nicht. Firmen wie Intel, MOS Technology und Motorola tasteten sich an die Möglichkeiten heran. In diese Situation hinein stellte Motorola 1974 seinen neuen Prozessor vor: den Motorola 6800, der ab etwa 1975 in größeren Stückzahlen verfügbar wurde. Er war weniger als isolierter Chip gedacht, sondern als Herzstück einer ganzen Systemfamilie, die Entwicklern den Aufbau kompletter Steuer- oder Rechnersysteme erleichtern sollte.
Motorola kam aus einer anderen Tradition als viele der später berühmten Heimcomputerhersteller. Das Unternehmen hatte seine Wurzeln in der Funktechnik der 1920er-Jahre und entwickelte sich über Jahrzehnte zu einem bedeutenden Hersteller von Halbleitern für Industrie, Militärtechnik und Kommunikation. Mikroprozessoren wurden daher zunächst vor allem als Bausteine für Steueranlagen, Terminals oder Messgeräte betrachtet – weniger als Grundlage für Heimcomputer. Genau aus dieser Perspektive entstand der 6800.
Technisch handelte es sich um einen 8-Bit-Prozessor mit einem 16-Bit-Adressraum, der also bis zu 64 Kilobyte Speicher ansprechen konnte – ein für die damalige Zeit typischer Wert. Die Taktfrequenz lag meist bei etwa 1 MHz, wobei reale Systeme je nach Speicher und Busdesign geringfügig darunter arbeiteten. Intern verfügte der Prozessor über zwei Akkumulatorregister (A und B), ein Indexregister, einen Program Counter sowie einen 16-Bit-Stack Pointer. Diese Struktur war übersichtlich und für Entwickler relativ leicht nachvollziehbar. Viele Ingenieure schätzten besonders, dass der Stack Pointer direkt adressierbar war – eine Eigenschaft, die bei Softwareentwicklung und Unterprogrammen praktische Vorteile brachte.
Wichtiger als die CPU selbst war jedoch Motorolas Konzept einer kompletten Mikroprozessorfamilie. Statt nur einen Prozessor anzubieten, entwickelte das Unternehmen eine Reihe passender Peripheriechips, die zusammen ein vollständiges System bildeten. Dazu gehörten etwa der 6820 PIA (Peripheral Interface Adapter) für parallele Ein- und Ausgaben, der 6850 ACIA (Asynchronous Communications Interface Adapter) für serielle Kommunikation sowie Timer- und Taktbausteine wie der 6840 Programmable Timer Module. Motorola stellte damit eine Art Baukasten bereit, aus dem Entwickler komplette Steuerrechner zusammensetzen konnten – ein Ansatz, der besonders in industriellen Anwendungen und frühen Embedded-Systemen großen Anklang fand.
Um diese Architektur praktisch nutzbar zu machen, bot Motorola auch eigene Entwicklungsgeräte an. Eines der bekanntesten war das MEK6800D2 Microprocessor Evaluation Kit, ein Single-Board-System, das in vielen Labors, Ausbildungsstätten und Entwicklungsabteilungen eingesetzt wurde. Das Board besaß eine einfache Hexadezimal-Tastatur, LED-Anzeige und Monitorprogramme im ROM, sodass Ingenieure Programme direkt eingeben und testen konnten. In Universitäten und technischen Schulen gehörten solche Systeme bald zur Standardausrüstung, weil sie einen relativ unkomplizierten Einstieg in die Mikroprozessorprogrammierung ermöglichten. Ergänzt wurde dies durch größere Entwicklungsstationen wie das Motorola EXORciser-System, auf dem Software komfortabler erstellt und anschließend auf Zielhardware übertragen werden konnte.
Aus heutiger Sicht fällt auf, dass die Chips der 6800-Familie relativ stromhungrig waren. Ein einzelner Prozessor benötigte typischerweise etwa 150 bis 300 Milliampere bei fünf Volt Versorgungsspannung. Im Vergleich zu späteren Designs – etwa dem deutlich effizienteren MOS Technology 6502 – wirkte dies recht hoch, entsprach jedoch durchaus dem Stand der frühen Mikroprozessorentwicklung. Viele Systeme jener Zeit waren ohnehin nicht auf minimale Leistungsaufnahme optimiert, sondern auf robuste Funktion in industriellen Umgebungen.
Ein interessanter Aspekt der Geschichte des 6800 liegt in seiner indirekten Rolle bei der Entstehung eines seiner größten Konkurrenten. Mehrere Ingenieure, die an der Entwicklung der Motorola-Architektur beteiligt gewesen waren, verließen das Unternehmen später und arbeiteten bei MOS Technology an einer neuen CPU. Daraus entstand der berühmte MOS Technology 6502, dessen Architektur teilweise an Konzepte des 6800 erinnerte, aber deutlich kostengünstiger produziert werden konnte. Während Motorola seinen Prozessor zunächst für rund 175 Dollar anbot, wurde der 6502 kurz nach seiner Vorstellung 1975 für etwa 25 Dollar verkauft – ein Preissturz, der später Heimcomputer wie den Apple II, den Commodore PET oder den Commodore 64 ermöglichte.
Der 6800 selbst fand dagegen vor allem in professionellen Anwendungen Verwendung. In der Industrie tauchte er in Steuerungen, Messsystemen und Terminals auf, häufig in Kombination mit Motorolas eigener Entwicklungsumgebung. Auch im Bereich der Unterhaltungselektronik war die Architektur präsent. Besonders in den elektronisch gesteuerten Flipperautomaten der späten 1970er und frühen 1980er Jahre gehörten Prozessoren der 6800-Familie zu den zentralen Steuerkomponenten. Hersteller wie Williams Electronics oder Bally Manufacturing verwendeten entsprechende CPUs etwa in ihren Steuerplatinen-Systemen. Williams setzte beispielsweise im sogenannten System-3- und System-4-Pinball-Design der Jahre 1977 bis 1979 Mikroprozessoren der 6800-Familie ein, während Bally mit seinem MPU-17- und später MPU-35-Controller ähnliche Architekturen nutzte. Diese Rechner steuerten Spielregeln, Punktanzeigen, Lampen und Soundeffekte – Aufgaben, die zuvor mit diskreter Logik realisiert worden waren.
Auch in der Arcade-Industrie tauchten Varianten dieser Architektur auf. Einige Spielautomaten nutzten Prozessoren wie den Motorola 6802 oder 6808, die technisch eng mit dem ursprünglichen 6800 verwandt waren. Besonders frühe mikroprozessorbasierte Arcade-Steuerungen profitierten davon, dass die CPU zusammen mit den Peripheriechips ein relativ vollständiges Steuerungssystem bildete. Die Kombination aus CPU, I/O-Bausteinen und Timer-Chips machte es möglich, komplexere Spielmechaniken zu programmieren, ohne umfangreiche Spezialhardware entwickeln zu müssen.
Obwohl der Prozessor selbst nie die enorme Verbreitung späterer Heimcomputer-CPUs erreichte, spielte er in der technischen Entwicklung eine wichtige Rolle. Viele Konzepte, die später in Mikrocontrollern oder System-on-Chip-Lösungen selbstverständlich wurden – etwa die enge Zusammenarbeit von CPU und standardisierten Peripheriebausteinen – lassen sich bereits in der Architektur der 6800-Familie erkennen.
Während der 6800 vor allem in industriellen Steuerungen, Messsystemen und elektronischen Spielautomaten eingesetzt wurde, arbeitete Motorola gegen Ende der 1970er-Jahre bereits an einer deutlich leistungsfähigeren Prozessorarchitektur. Diese sollte sich nicht mehr nur an Steuerrechnern orientieren, sondern an der Leistungsfähigkeit kleiner Minicomputer.
Das Ergebnis dieser Entwicklung erschien 1979 unter dem Namen Motorola 68000. Trotz der ähnlichen Bezeichnung handelte es sich dabei nicht um eine direkte Weiterentwicklung des 6800, sondern um eine neue Architektur mit intern 32-Bit-Struktur, erweitertem Registersatz und deutlich größerem Adressraum. Motorola wählte den Namen bewusst so, dass er an die erfolgreiche 6800-Reihe erinnerte und gleichzeitig eine neue Generation von Mikroprozessoren einleitete.
Mit dem 68000 begann eine Prozessorfamilie, die in den folgenden Jahren zu den bedeutendsten CPU-Architekturen der Computerindustrie zählen sollte. Rechner wie der Apple Macintosh, der Commodore Amiga oder der Atari ST nutzten später Varianten dieser sogenannten 68k-Familie. Die Entwicklung dieser Architektur bildet daher ein eigenes Kapitel der Mikroprozessorgeschichte – eines, das unmittelbar an die frühen Erfahrungen anknüpfte, die Motorola mit dem 6800 gesammelt hatte.